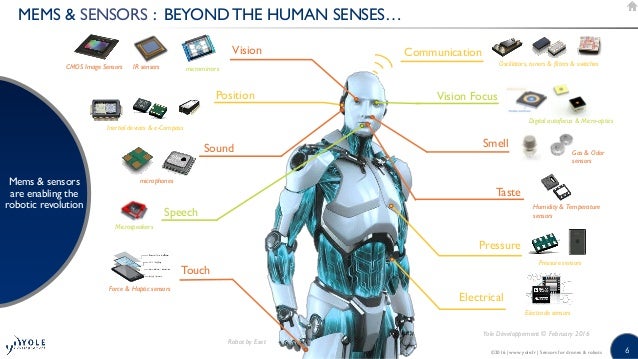
Robotic Sensors
In order for a robot to work independently, regardless of the level of independence, he must be "conscious" of himself and his surroundings. More precisely, the robot must be able to measure its own position and speed as well as measure different sizes in the working environment, thus gaining an outline of the outer space. Different measuring devices and systems that the robot receives information about themselves and the environment are called sensors. Today, there are angular and transverse displacement devices, different touch sensors, distance measuring devices, acceleration accelerators, etc. The special class of sensor systems are visual systems, which are already in use today. Since robots are expected to be exceptional independence in the future, this is a necessary prerequisite for significant advances in sensor technology such as, for example, sensing contact with the ability to determine smoothness and surface softness, three-dimensional vision, speech recognition, speech recognition,
Let's give another sensor breakdown. One type are so-called transducets. These are devices that convert one physical size (the one we want to emulate) into one another. The primer is the potentiometer that the shift moves to the electric voltage. The type of sensors gives the digital value of the measured size immediately.

Resistive Sensors
Resistive sensors are sensors which act as variable resistors. Different input to the sensor causes it to change it's resistance. Each sensor generally has a nominal resistance, which is it's resistance value for zero input.
Tactile Sensor
A tactile sensor is a device that measures information arising from physical interaction with its environment.Robots designed to interact with objects requiring handling involving precision, dexterity, or interaction with unusual objects, need sensory apparatus which is functionally equivalent to a human's tactile ability. Tactile sensors have been developed for use with robots.
Infrared sensors
Infrared sensors are used in a wide range of applications including here proximity robotic applications for distance and object detection, or color detection and tracking.
Ultrasonic distance sensor
Ultrasonic distance sensor determines the distance to an object by measuring the time taken by the sound to reflect back from that object. The frequency of the sound is somewhere in the range of ultrasound, this ensures more concentrated direction of the sound wave because sound at higher frequency dissipates less in the environment.
Internal sensor
An inertial measurement unit (IMU) is an electronic device that measures and reports a body's specific force, angular rate, and sometimes the magnetic field surrounding the body, using a combination of accelometres and gyroscopes, sometimes also magnetometers.
Orientation sensor
The orientation sensor gives information about its position compared to a reference plane. So you could use this to see of the device is tilted, upside down or something like that.Laser range sensors
A laser rangefinder is a rangefinder which uses a laser beam to determine the distance to an object. The most common form of laser rangefinder operates on the time of flight principle by sending a laser pulse in a narrow beam towards the object and measuring the time taken by the pulse to be reflected off the target and returned to the sender.


Comments
Post a Comment